A Taxonomy of Constraints in Black-Box Simulation-Based Optimization
WARNING: This page is heavily under construction, proceed with caution! Updated December 16, 2016
This page contains supplemental information for the paper [9]:
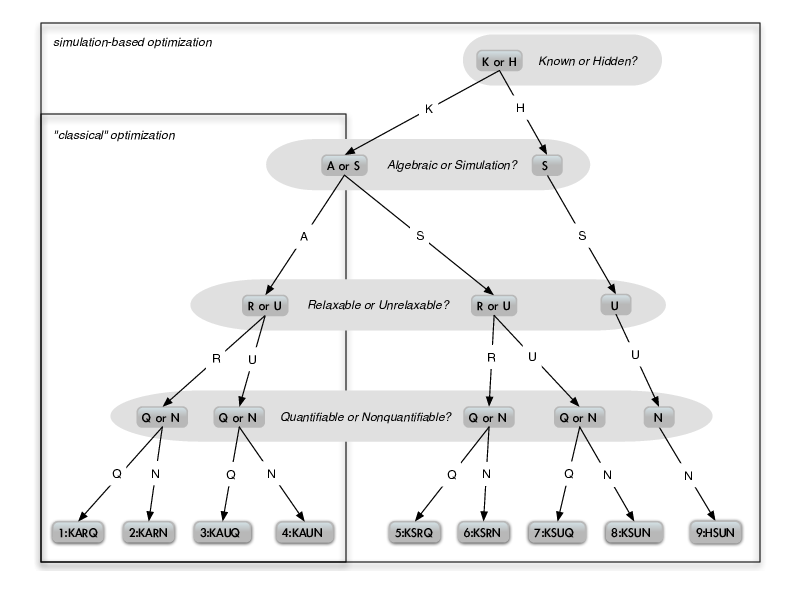
Here we provide examples for each of the nine leaves of the constraint taxonomy tree:
For additional information, and to submit use cases, please contact the authors.
This supplement shows that each of the nine leaves of the taxonomy tree is nonempty by providing constraint specifications, including examples from the literature, that belong to each leaf.
We note that many SBO problem specifications in the literature are composed of constraints of different types. The community groundwater problem [5] has KSRQ constraints as well as bound and linear constraints (KA**), while the LOCKWOOD problem [12] has a linear objective and simulation constraints (S); different simulation-based instances of the LOCKWOOD constraints are considered in [7] alongside solution methodologies for the resulting formulations. The STYRENE problem from [2] has 11 simulation constraints corresponding to Leaves 5 and 8 of the taxonomy tree: 7 quantifiable and relaxable constraints KSRQ, and 4 unrelaxable binary constraints KSUN.
This constraint class captures the most common types of constraints found in classical nonlinear optimization.
 forest
forest
The GMON problem described in [1] involves placing gamma monitoring devices in a region represented by the image of a map. There are several locations on the map (corresponding to forests, lakes, etc.) that are deemed unallowable for placement. However, the simulation, which analyzes the effects of placing devices at particular locations, is independent of the surface topology and thus can still evaluate such unallowable placements. The constraints associated with these unallowable locations are also quantifiable, since one can compute distances to the nearest (in)feasible location on the map.
In [8], a nonlinear-least-squares problem is solved for parameter values that calibrate a nuclear energy density functional to experimental data. Each residual involves running a simulation associated with self-consistency of the underlying system. Bounds are imposed in [8] on half of the parameters (those associated with nuclear matter properties) because the unconstrained solution yields values that are not transferable to other nuclear structure calculations. Because the simulation still yields meaningful output when these bounds are violated (as evidenced by the unconstrained problem being solved), these algebraic and quantifiable constraints are also relaxable.
A violation measure is quantified by, for example, min |xi|, |1−xi|
|xi|, |1−xi| and
thus this constraint is KARQ provided the binary variable x1 is relaxable.
and
thus this constraint is KARQ provided the binary variable x1 is relaxable.
A good example of an KARN constraint is a categorical (e.g., nonordinal) variable constrained to a subset of its possible values. Such cases arise often in multifidelity optimization.
For the purpose of designing a supersonic airfoil, [10] considers different available analysis simulators – such as a linearized panel method (“panel”) and an Euler CFD solver (“Cart3D”) – with varying fidelity levels. The final design must be evaluated by the more costly and accurate Cart3D simulator, but an optimization algorithm can use the less expensive, inaccurate panel simulator at intermediate points. The constraint “simulator = Cart3D” is relaxable because another option for the simulator exists.
Consider a simulator that drives a C++ compilation, based on two categorical variables, each specified to take on two allowable values, x1 ∈ {gcc,icc} and x2 ∈ {O2,O3}. We want the final solution to have x2 = O2 if x1 = gcc, and this constraint is of type KARN.
We note that the two set constraints, x1 ∈{gcc,icc} and x2 ∈{O2,O3}, may be KAUN; see below.
In SBO, one of the most common occurrences of KAUQ constraints are algebraic constraints that play a (possibly secondary) role of ensuring that the input to a simulation satisfies the expectations of the simulator.
For the groundwater bioremediation problem considered in [7], pumping rates r must be determined for each of six extraction wells. Because the simulator was hardcoded to allow only for extraction (and not injection) at these six sites, the constraints are unrelaxable. Furthermore, the quantity max{0,ri} provides a quantifiable measure of feasibility.
When this constraint is unrelaxable, it is a KAUQ constraint; the distance to the set provides a means of quantifying how infeasible an x is (despite that one could not evaluate some simulation quantity at such infeasible points).
The allowable domain of a categorical variable is a typical example of a KAUN constraint.
Categorical decision variables often exist when optimizing the performance of a computer code. For example, for optimization of linear algebra kernels in [4], categorical variables such as loop order (e.g., permuting groups of nested for loops) and compiler type are considered.
Any quantifiable and relaxable constraint that depends on a simulation output is a KSRQ constraint.
In the chemical engineering application for the production of styrene considered in [2], called STYRENE, one of the simulation outputs is the purity of the styrene produced. The problem demands that a minimal purity level is met, but intermediate designs can fall below this level, with a natural measure of violation being how far short of 0.99 the obtained purity level is.
In [3], the algorithmic parameters of an optimization solver are tuned in order to minimize the CPU time needed to solve a set of test problems. Here, the “simulator” is a call of the solver being tuned on a particular test problem. The authors consider constraints on correctness of the output, in particular that at least 90% of the runs satisfy a prescribed convergence criterion.
A relaxable constraint that relies on binary or nonordinal output from a simulation is a KSRN constraint.
A common objective in code performance optimization is to minimize the run time of a generated code. Changes to the code may result in code that still compiles and runs, but for which undesirable warnings are produced during compilation. In [6], the run times of decision variable values that resulted in problems (errors or warnings) during compilation were discarded from the analysis. The constraint that there are no warnings requires one to generate, compile, and check the compilation output of the associated code is thus “simulation-based;” [6] only considers the binary measures of this constraint, which is relaxable since run times can still be obtained (assuming that no compile errors were seen).
A simulator displays a flag indicating whether a toxicity level has been reached during the simulation, but we know neither when this occurred nor the level of toxicity.
Constraints that are both quantifiable and unrelaxable arise, for example, in multidisciplinary optimization (MDO), where one has a compatibility constraint between the simulations of two or more disciplines. Violating such a constraint can lead to unmeaningful output with respect to one of the disciplines.
Compatibility constraints in MDO often arise when a given discipline’s output(s) is used as the input of another discipline. Bounds on these quantities are typical KSUQ constraints, such as the problem presented in [11, Section 5.1]. In this example, the first discipline output (y1) appears with a squared root in the equation of the other discipline. The bound constraint y1 ≥ 3.16 is specified in [11] and is a KSRQ constraint because it can be relaxed (albeit not arbitrarily so) and still result in meaningful output from the second discipline. The constraint y1 ≥ 0, however, is unrelaxable and thus a KSUQ constraint (despite seeming to be redundant in the presence of the relaxable constraint y1 ≥ 3.16).
One of the outputs cS(x) of a simulation is a concentration level; if it is below zero, the simulation stops and displays NaN for all the outputs except cS. Consequently, this constraint is both unrelaxable and quantifiable (since there is a measure for how close one is to violating this constraint).
Constraints based on binary- and nonordinal-valued simulation outputs that must be satisfied are typical KSUN constraints.
In the STYRENE problem of [2], four of the eleven simulation-based constraints correspond to binary flags about the convergence of internal numerical methods. In the case of the SEP-STY flag denoting failure, some of the other flags may still denote success; hence, one has richer information about the source of failure than one does for a hidden constraint.
If a simulation outputs an exit flag that denotes success (“0”) or multiple error code values, each with associated documentation, then one can have an indication for why the simulation did not succeed.
Each of these examples is not a hidden constraint since the reason for the violation can be identified. In contrast, a single binary flag indicating that the simulation failed is considered as a hidden constraint. In the same way, an error message that cannot be interpreted is equivalent to such a flag and hence should be interpreted as hidden.
Hidden constraints provide no information about the cause for failure of a simulation.
[1] Alarie, S., Audet, C., Garnier, V., Le Digabel, S., Leclaire, L.A.: Snow water equivalent estimation using blackbox optimization. Pacific Journal of Optimization 9(1), 1–21 (2013). URL http://www.ybook.co.jp/online2/oppjo/vol9/p1.html
[2] Audet, C., Béchard, V., Le Digabel, S.: Nonsmooth optimization through mesh adaptive direct search and variable neighborhood search. Journal of Global Optimization 41(2), 299–318 (2008). DOI 10.1007/ s10898-_007-_9234-_1
[3] Audet, C., Dang, C.K., Orban, D.: Algorithmic parameter optimization of the DFO method with the OPAL framework. In: Software Automatic Tuning: From Concepts to State-of-the-Art Results, k. naono and k. teranishi and j. cavazos and r. suda edn., chap. 15, pp. 255–274. Springer (2010). URL http://goo.gl/7uhn4
[4] Balaprakash, P., Wild, S.M., Hovland, P.D.: Can search algorithms save large-scale automatic performance tuning? Procedia Computer Science (ICCS 2011) 4, 2136–2145 (2011). DOI 10.1016/j.procs.2011.04.234
[5] Fowler, K.R., Reese, J.P., Kees, C.E., Dennis, Jr., J.E., Kelley, C.T., Miller, C.T., Audet, C., Booker, A.J., Couture, G., Darwin, R.W., Farthing, M.W., Finkel, D.E., Gablonsky, J.M., Gray, G., Kolda, T.G.: Comparison of derivative-free optimization methods for groundwater supply and hydraulic capture community problems. Advances in Water Resources 31(5), 743–757 (2008). DOI 10.1016/j.advwatres.2008.01.010
[6] Gramacy, R.B., Taddy, M.A., Wild, S.M.: Variable selection and sensitivity analysis via dynamic trees with an application to computer code performance tuning. Annnals of Applied Statistics 7(1), 51–80 (2013). DOI 10.1214/12-_AOAS590
[7] Kannan, A., Wild, S.M.: Benefits of deeper analysis in simulation-based groundwater optimization problems. In: Proceedings of the XIX International Conference on Computational Methods in Water Resources (CMWR 2012) (2012). URL http://www.mcs.anl.gov/~wild/papers/2012/AKSW12.pdf
[8] Kortelainen, M., Lesinski, T., Moré, J., Nazarewicz, W., Sarich, J., Schunck, N., Stoitsov, M.V., Wild, S.M.: Nuclear energy density optimization. Physical Review C 82(2), 024,313 (2010). DOI 10.1103/ PhysRevC.82.024313
[9] Le Digabel, S., Wild, S.M.: A taxonomy of constraints in black-box simulation-based optimization. Preprint ANL/MCS-P5350-0515, Argonne National Laboratory, Mathematics and Computer Science Division (2015). URL http://www.mcs.anl.gov/papers/P5350-_0515.pdf
[10] March, A., Willcox, K.: Constrained multifidelity optimization using model calibration. Struct. Multidiscip. Optim. 46(1), 93–109 (2012). DOI 10.1007/s00158-_011-_0749-_1
[11] Martins, J., Marriage, C., Tedford, N.: pyMDO: An Object-Oriented Framework for Multidisciplinary Design Optimization. ACM Transactions on Mathematical Software 36(4), 20:1–20:25 (2009). DOI 10.1145/ 1555386.1555389
[12] Matott, L.S., Leung, K., Sim, J.: Application of MATLAB and Python optimizers to two case studies involving groundwater flow and contaminant transport modeling. Computers & Geosciences 37(11), 1894–1899 (2011). DOI 10.1016/j.cageo.2011.03.017